Thématique : Interactions tactiles
La simulation du toucher nécessite d’une part la conception et le contrôle de stimulateurs tactiles et d’autre part leur évaluation psychophysique. Il s’agit de développer des technologies d’interfaces polyvalentes, peu énergivores et compactes répondant à deux types de tâches. Le premier type consiste à trouver, discriminer, confirmer et identifier uniquement par stimulation tactile ou multi-modale (tactile et visuelle ou auditive). Le second, à assurer la restitution de textures à partir d’informations tribologiques ou vibratoires, avec la mise en place de procédures d’acquisition et de définition de consignes d’entrée aux stimulateurs tactiles. Le codage des informations tactiles via des approches de compressions de données similaires à ce qui se fait pour les images est également mis en œuvre.
Les stimulateurs existants sont conçus selon plusieurs approches :
- La topologie d’une surface que l’on qualifiera de virtuelle est reproduite. Cela se traduit du point de vue technologique, par une matrice de picots dont on peut régler indépendamment l’élévation, et que l’utilisateur explore librement.
- D’autres implantations technologiques utilisent des ondes acoustiques focalisées pour produire des sensations dans l’air et sans contact. La reproduction de surface permet de simuler de grandes surfaces virtuelles, mais a comme principal défaut la faible résolution des détails tactiles. En particulier, il est très difficile de reproduire l’illusion de toucher des surfaces présentant des micro rugosités ou une pilosité superficielle. Une deuxième approche consiste, elle, à reproduire l’effet de la surface réelle si elle était touchée. Il s’agit là de reproduire les contraintes locales de cisaillement de la peau lors de la phase d’exploration.
- Une autre implantation matérielle consiste à moduler dynamiquement et en fonction de la position du doigt, les forces de cisaillement à l’interface doigt-simulateur. Dans ce cas précis, la surface du contact doigt-simulateur est lisse et plane, mais on est capable d’en moduler le frottement avec le doigt, la rendant plus ou moins glissante.
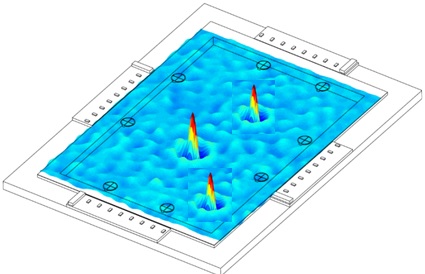
(Ci-contre :
Le retournement Temporel : Fournir un retour haptique impulsionnelle basé sur le principe du retournement temporel. Crédit CEA LIST)
Ainsi, il n’existe pas de stimulateur tactile universel, qui permettrait de simuler l’ensemble des descripteurs du toucher, mais un ensemble de propositions technologiques chacune permettant de simuler un certain type de descripteur. L’un des objectifs de ce GDR est de permettre d’étoffer le nombre de propositions technologiques par exemple en permettant :
- d’associer plusieurs types de stimulateurs entre eux,
- de proposer de nouvelles formes de stimulation tactile permettant la reproduction de descripteurs non encore stimulés,
- d’associer les commandes et les mesures permettant la simulation répétable et calibrée d’un utilisateur à un autre.
Commande des stimulateurs pour la simulation
Cette action est transversale entre les 3 groupes de travail du GDR.
En plus de la conception de stimulateurs performants et intelligents, il faut générer les signaux de commande de ces dispositifs afin qu’ils simulent la texture voulue. Dans le cas de la simulation d’une texture réelle, trois étapes principales sont alors nécessaires :
- Caractériser la surface à simuler,
- Identifier les critères pertinents au regard de la perception,
- Générer le signal de commande simulant la surface voulue.
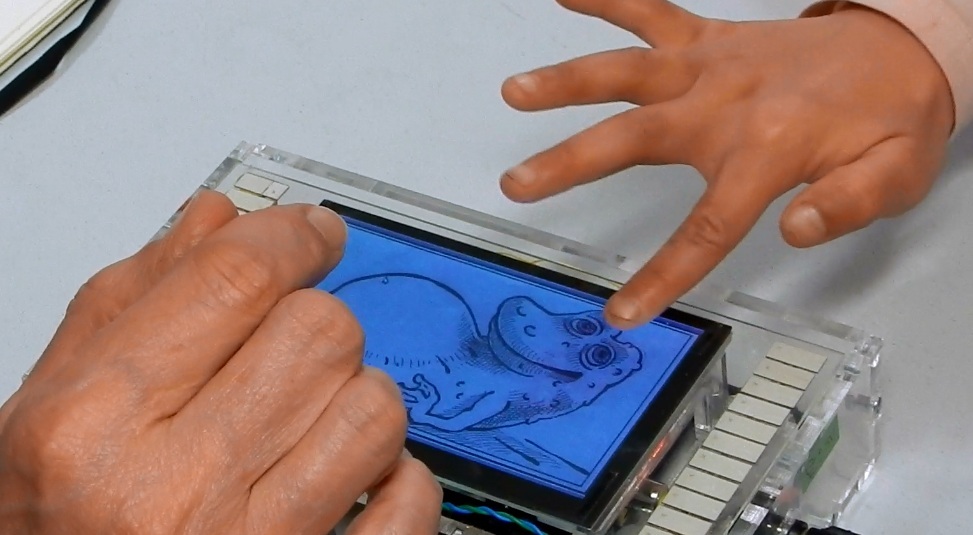
(Ci-contre :
E-Vita : stimulateur tactile intégré sur un écran simulant une texture. Crédit IRCICA/L2EP)